Browse categories
Explore
Fiverr Pro
English
$
USD
AI, DeepStream, and Robotics solutions optimized for your edge devices
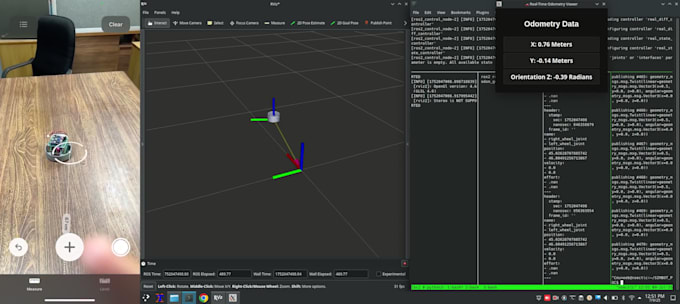
Are you looking to integrate AI at the edge for your robotics application? I specialize in building hardware-accelerated Edge AI solutions using ROS2, perfectly tailored for real-time, low-latency robotic systems.
As a robotics and ROS2 expert, I will help you deploy smart robotic applications directly on edge hardware like Jetson Nano, Xavier, Raspberry Pi, Coral TPU, and more enabling offline inference, sensor fusion, and real-time control using advanced AI models.
What I Offer:
Technologies I Use:
Ideal For:


Platform:
NVIDIA Jetson
Sensors:
Accelerometer
•
Ultrasonic
•
Infrared
•
Camera
Q1: What kind of hardware platforms do you support?
A: I support a wide range of edge devices including NVIDIA Jetson Nano/Xavier, Raspberry Pi 4, Intel NUC, Coral Dev Board, and other ARM/x86-based platforms.
Q2: Can you deploy AI models like YOLO or pose estimation on edge devices?
A: Yes! I can optimize and deploy models such as YOLOv5, YOLOv8, MoveNet, and custom CNNs using TensorRT, ONNX, or TensorFlow Lite for efficient edge inference.
Q3: Will you integrate the AI model into a ROS2 node?
A: Absolutely. I will create or modify ROS2 nodes to wrap your AI model, publish inference results, and integrate it with your robotic control pipeline.
Q4: Do you provide hardware interfacing like controlling motors or reading sensors?
A: Yes, I can interface your hardware (e.g., motors, cameras, LIDAR, IMUs, etc.) with ROS2 using custom or standard drivers.
Q5: I already have an AI model trained — can you deploy it on my hardware?
A: Definitely! Just share the model file and format, and I’ll handle the conversion, optimization, and ROS2 integration for edge deployment.