Deploy reliable, autonomous navigation on your mobile platform. I specialize in configuring, tuning, and debugging the ROS 2 Navigation Stack (Nav2) and SLAM pipelines to ensure robust localization and smooth path planning.
Technical Scope:
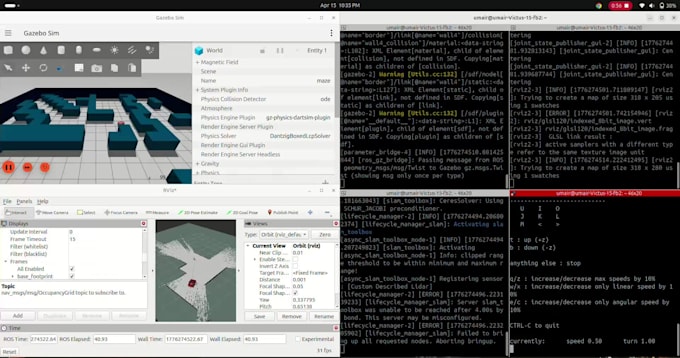
- Mapping & SLAM: Configuration of SLAM Toolbox or Cartographer for high-resolution 2D occupancy grid generation.
- Localization Tuning: Optimization of AMCL (Adaptive Monte Carlo Localization) parameters to prevent particle dispersion and drift.
- Costmap Configuration: Tuning global and local costmaps, inflation radii, and obstacle layers for safe collision avoidance.
- Path Planning & Control: Behavior tree adjustment alongside custom configurations for planners and controllers (Dijkstra, DWA, or TEB Local Planner).
Compatible with both ROS 2 Humble and Jazzy setups. Please provide your URDF or Gazebo environment details prior to starting.