Browse categories
Explore
Fiverr Pro
English
$
USD




Before you crash a $5,000 custom drone or risk damaging a physical prototype, you need a physics-accurate simulation.
Testing your code in a virtual environment is the safest and most cost-effective way to develop robotics. It guarantees zero risk to your hardware and saves you thousands in repair and replacement costs.
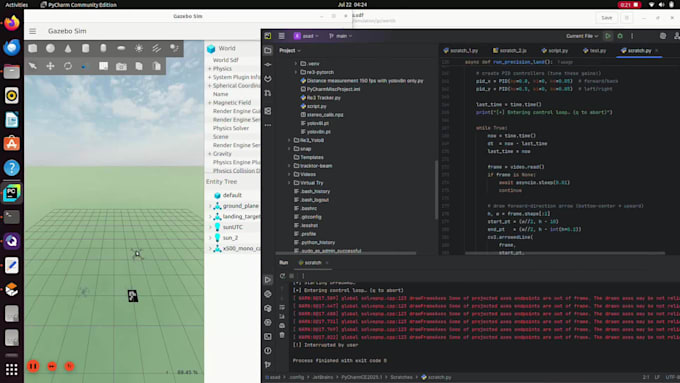
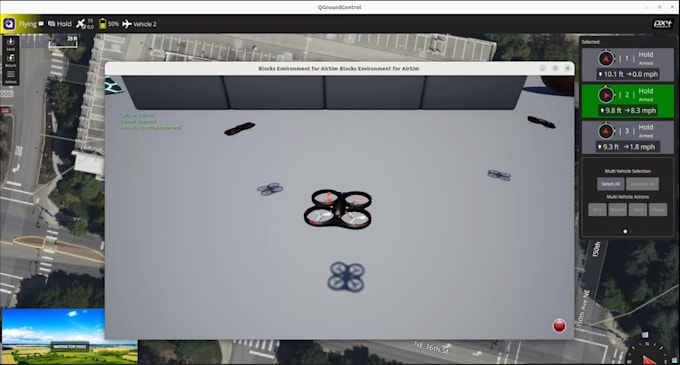
I am a robotics and aerospace engineer building custom testing environments in Gazebo and Unity. Whether you need help converting a CAD file into a working URDF, or a complex 3D environment with advanced physics and full control/navigation integration, I can build exactly what your project requires.
What I can do for your project:
Tools: Gazebo, Unity3D, ROS/ROS2, Python, C++, SolidWorks.
AI Developer, Robotics Engineer, FPV Drone Design Expert
Languages
What types of projects are best suited for your simulations?
They are perfect for testing autonomous rovers (UGVs), custom drones (UAVs), and robotic arms. If you need to test ROS/ROS2 navigation stacks, computer vision algorithms, or verify physical constraints before building real hardware, these simulations are the ideal fit.