Browse categories
Explore
Fiverr Pro
English
$
USD






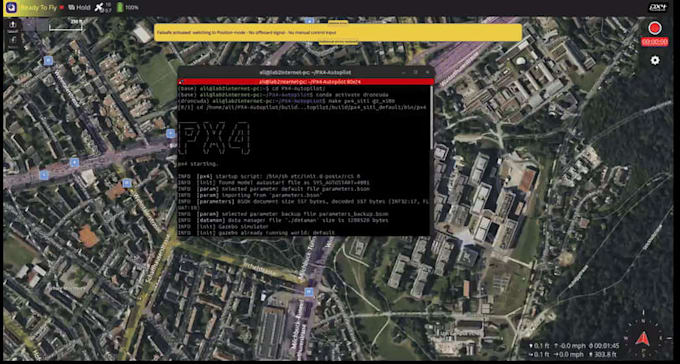
I will create realistic drone simulations using PX4, Gazebo, and ROS for single or multiple drones. My simulations include autonomous navigation, AI-based control, and multi-drone tracking, allowing you to test flight algorithms safely and efficiently.
Whether you need a basic single-drone flight, multi-drone tracking, or a complete AI-controlled simulation environment, I can deliver a ready-to-run desktop application with source code.
What you get with my gig:
Ideal for researchers, developers, and hobbyists who want to test drone algorithms, robotics projects, or AI navigation in a safe virtual environment.
Keywords included naturally: PX4, Gazebo, ROS, Drone Simulation, Robotics AI, Multi-drone Tracking, AI control
InjectAIsolution
Languages
What do you need from me to start?
Please provide drone type, number of drones, simulation environment details, and any specific scenario requirements.
Can you simulate multiple drones at once?
Yes, multi-drone simulation with autonomous navigation and tracking is available in Standard and Premium packages.
Do you provide source code?
Yes, all Premium packages include source code so you can modify or expand the simulation.
Can you integrate AI control into existing simulations?
Absolutely! I offer AI model fine-tuning and integration with existing apps in the Premium package.
How long will delivery take?
Delivery time depends on the package: Basic – 3 days, Standard – 5 days, Premium – 7 days.