Browse categories
Explore
Fiverr Pro
English
$
USD
Digital Marketing Expert, Game Developer, Graphics Designer
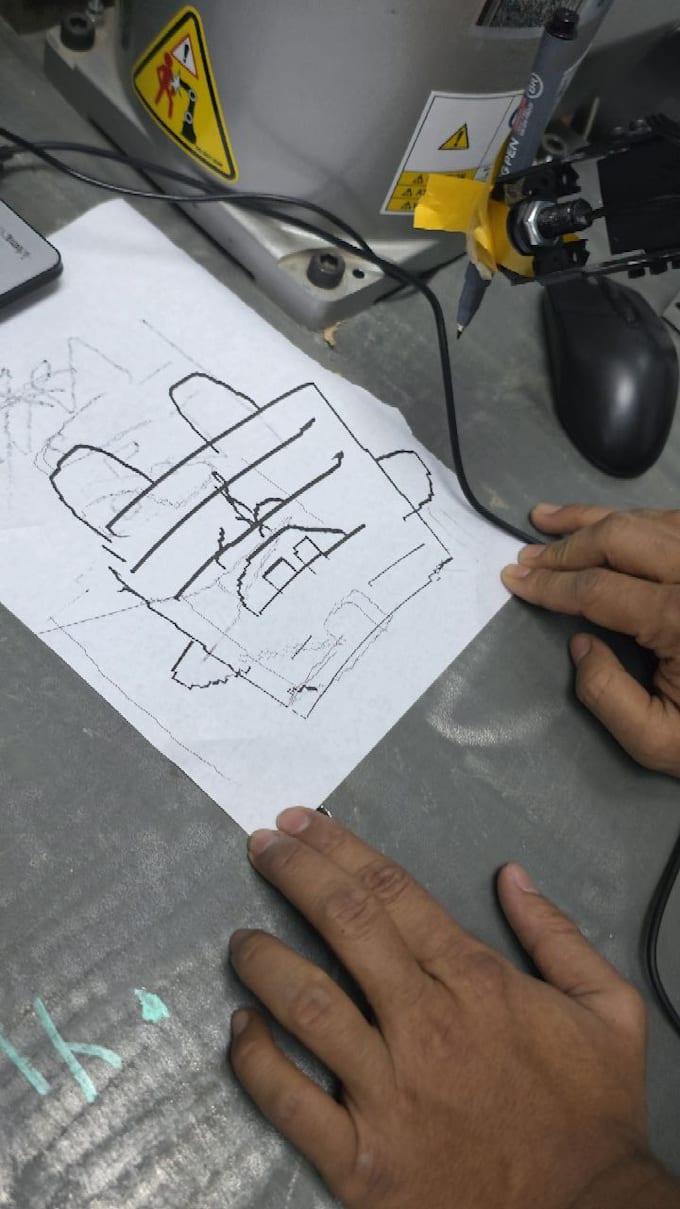
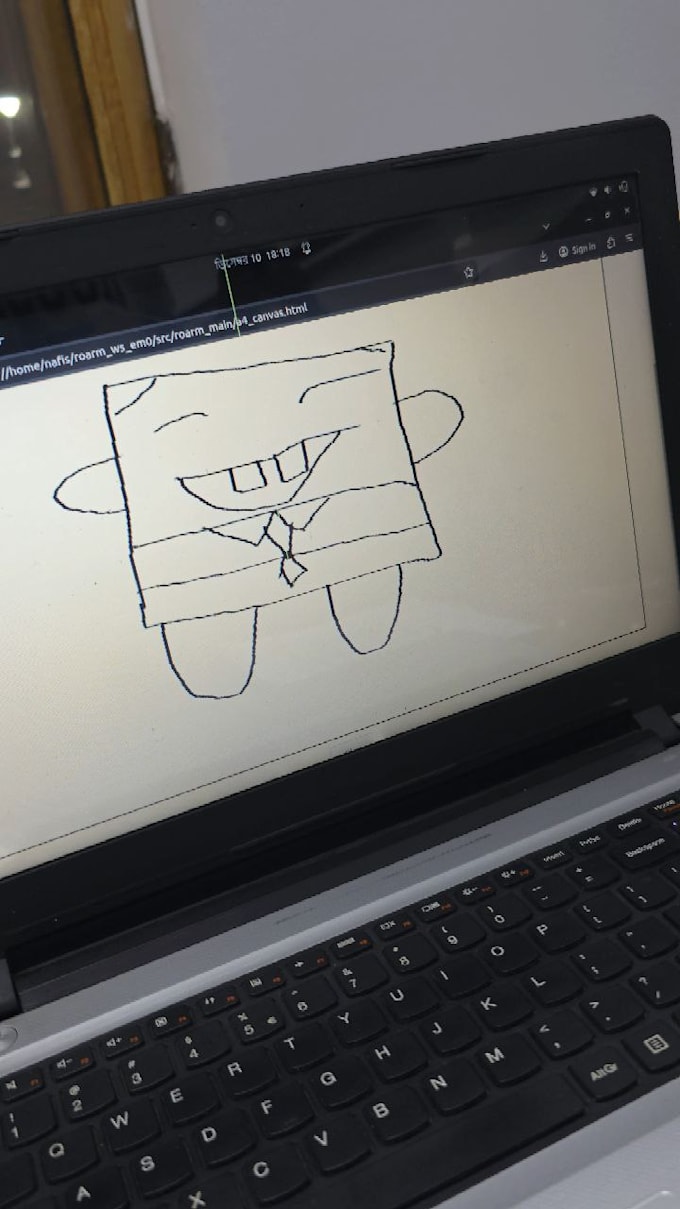
Having trouble with ROS2? I can help diagnose and fix build errors, package issues, DDS communication problems, Gazebo simulation errors, RViz visualization issues, Nav2 configuration problems, and robot integration challenges. I work with ROS2 Humble and Jazzy, Ubuntu Linux, Python, C++, TurtleBot3, and Unitree robots. Send me your logs, screenshots, or project files, and I'll help get your system running again.



Platform:
Raspberry Pi
Sensors:
Temperature
•
Accelerometer
•
Infrared
•
Camera
•
Lidar
What ROS2 distributions do you support?
I primarily support ROS2 Humble and Jazzy. I can also assist with Foxy and Galactic for debugging and maintenance tasks.
What information do you need before starting?
Please provide: ROS2 version Ubuntu version Error logs or terminal output Screenshots (if applicable) Project source code or repository link Description of the expected behavior The more information you provide, the faster I can diagnose the issue.
Can you help with Gazebo and RViz issues?
Yes. I can troubleshoot: Gazebo simulation errors Robot model loading issues Plugin problems RViz visualization issues TF tree errors Sensor display problems
Can you fix ROS2 networking and DDS communication problems?
Yes. I can help with: Multi-machine communication ROS_DOMAIN_ID configuration Discovery issues DDS middleware configuration Robot-PC communication problems