Browse categories
Explore
Fiverr Pro
English
$
USD
Design Engineer Manufacture
Level 2
Has met high performance criteria and has a proven track record for meeting client expectations.
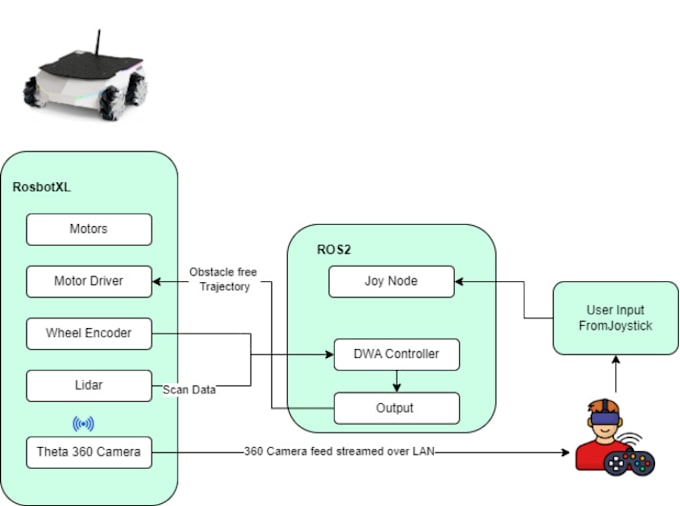
Are you building a mobile robot or autonomous system and need expert support with ROS 2? Youve come to the right place! I specialize in developing advanced robotics projects using ROS 2, with a focus on:
What I Offer:
Navigation Stack (Nav2)
Need your robot to autonomously navigate through maps, avoid obstacles, or follow waypoints? Ill configure and tune the full Nav2 stack, including mapping, localization, path planning, and behavior trees.
Robot Kinematics
Ill implement and validate forward and inverse kinematics for differential, omnidirectional, or custom mobile bases.
Custom Python Controllers
From writing ROS 2 nodes in Python to building custom controllers for motion planning or sensor fusion I can tailor solutions for your unique robotic needs.
Simulation (Gazebo, RViz)
Test your robot in simulation before moving to the real world. I support Gazebo/Ignition, RViz2, and more.
Lets build your robot together!
Message me before placing an order so I can understand your needs and deliver the best solution.
Reagrds,
Syed Huzaifa




Platform:
Raspberry Pi
Sensors:
Accelerometer
•
Camera
•
Lidar
•
Position
•
Location
Expertise:
Microcontrollers
•
IoT
•
ROS
•
AI
•
Programming